UHF 유도 담금질 : UHF 유도 가열 경화 장비는 공작물의 표면을 급냉 온도로 빠르게 가열 한 다음 급속 냉각하여 공작물 표면에 마르텐 사이트 변태를 만들어 필요한 물리적 특성을 충족시키는 데 사용됩니다.
완전 자동화: 사람의 개입 없이 기계나 장치를 통해 규정된 절차나 지침에 따라 자동으로 작동 또는 제어하는 과정으로 "안정적이고 정확하며 빠름"을 목표로 합니다. 자동화 기술의 사용은 육체 노동, 정신적 노동의 일부 및 가혹하고 위험한 작업 환경에서 사람들을 해방시킬 수 있을 뿐만 아니라 인간의 장기 기능을 확장하고 노동 생산성을 크게 향상시키며 세계를 이해하고 변화시키는 인간 능력을 향상시킬 수 있습니다.
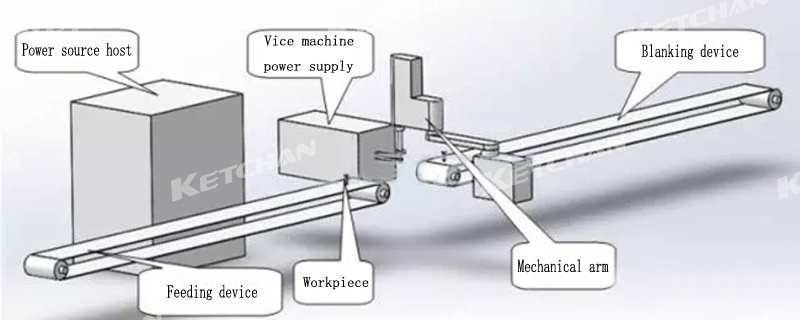
유도 경화 기술 프로세스:
기술 프로세스: 전원 켜기 → 이송 테이블이 공작물 이송 → 로봇 팔이 공작물을 잡고 → 가열 영역으로 이동 → 담금질 → 냉각 → 로봇 팔이 공작물을 잡고 언로딩 영역으로 보냅니다.
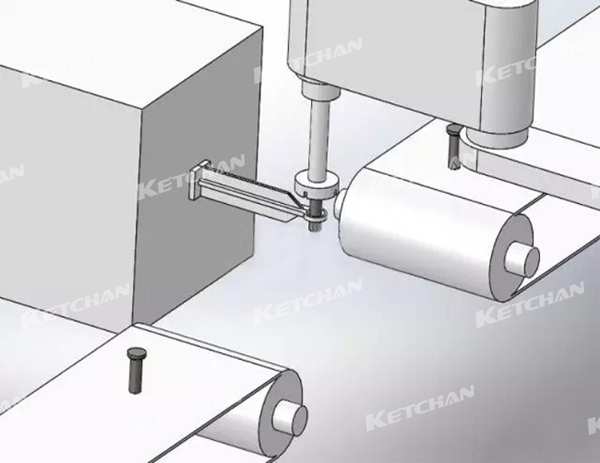
단일 회전 연속 스캐닝 유도 담금질 방법을 사용하여 먼저 로봇 팔의 모션 프로그램을 편집하고 모든 장비를 정상적으로 시작하면 로봇 팔이 설정된 프로그램에 따라 움직이기 시작하고 공작물을 잡고 회전하여 가열 위치로 이동합니다. 설정된 프로그램에 따라 회전하면서 하향으로 일정한 속도로 이동하면 유도코일에 의해 가열영역이 차례로 급냉온도까지 가열되고 유도코일 하단은 표면 급냉이 완료될 때까지 물을 분사하여 냉각된다.
UHF 가열 장비의 매개 변수는 실제 프로세스 요구 사항에 따라 설정해야 하며 사용되는 로봇 팔의 모델은 공작물의 모양과 무게에 따라 선택해야 합니다.
밸브 태핏 유도 경화 코일 제작:
인덕터는 유도를 통해 부품의 표층에 전기 에너지를 보내고, 와전류와 자기 테이프의 작용에 의해 부품의 표층에 있는 전기 에너지를 열에너지로 변환하고, 부품의 표면을 가열하여 퀜칭에 도달합니다. 온도.
로봇 팔에 대한 설명:
SCARA(Selective Compliance Assembly Robot Arm) 로봇으로도 알려진 평면 관절 로봇은 조립 작업에 사용되는 로봇 팔입니다.
SCARA 로봇에는 평면에서 위치 지정 및 방향 지정을 위해 축이 서로 평행한 3개의 회전 조인트가 있습니다. 다른 조인트는 평면에 수직인 엔드 피스의 움직임을 완료하는 데 사용되는 이동 조인트입니다. 손목 기준점의 위치는 그림과 같이 두 회전 관절의 각도 변위 φ1, φ2와 움직이는 관절의 변위 z, 즉 p=f(φ1, φ2, z)에 의해 결정됩니다. 아래에. 이러한 유형의 로봇은 구조가 가볍고 응답이 빠르며 평면 위치 결정 및 수직 작업에 가장 적합합니다.
로봇 팔은 실제 요구 사항에 따라 매개변수를 설정하도록 프로그래밍할 수 있습니다. 중간 릴레이를 통해 UHF 전원 공급 장치에 연결하여 UHF 기계의 시작 및 중지를 제어하여 자동 생산을 실현할 수 있습니다.



 CNC 경화 시스템
CNC 경화 시스템 유도 열처리 시스템
유도 열처리 시스템




